
Researchers Gorka Velez and Ángel Martín from Vicomtech Foundation, Basque Research and Technology Alliance (BRTA), Donostia-San Sebastián, Spain and Giancarlo Pastor and Edward Mutafungwa from the Department of Communications & Networking, Aalto University School of Electrical Engineering, Aalto, Finland, published an article on Sensors (19 November 2020), regarding 5G for Connected Automated Mobility. The article provides an update review on this topic. Here there are some of the key issues.
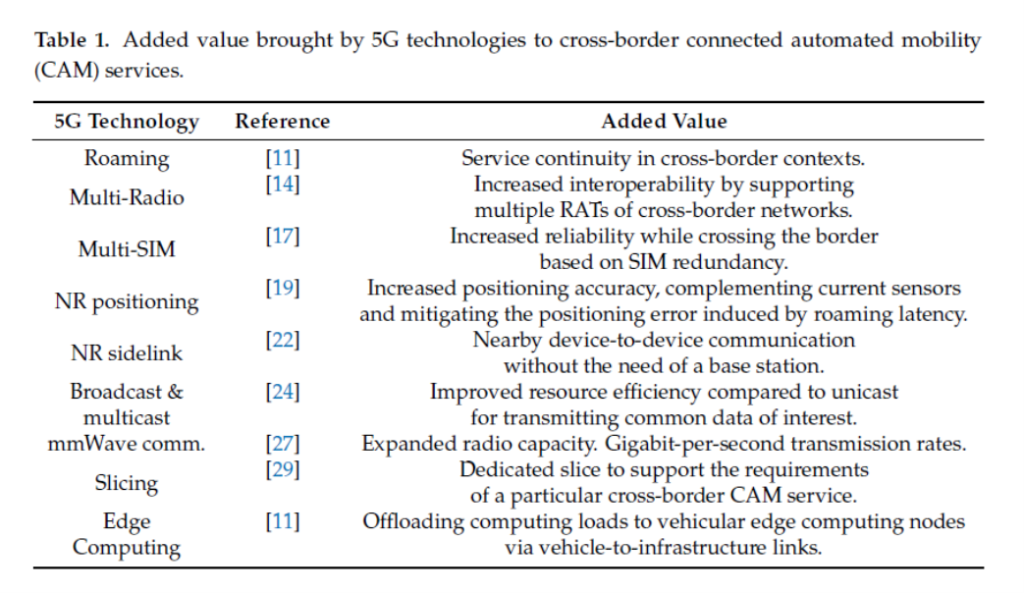
Fifth-generation (5G) mobile networks aim to be qualified as the core connectivity infrastructures to address connected automated mobility (CAM), both from a technological and from a business perspective, for the higher automation levels defined by the automotive industry. Specifically, in some territories such as the European Union the cross-border corridors have relevance, as they are the cohesive paths for terrestrial transport. Therefore, 5G for CAM applications is planned to be deployed there first.
Cross-border corridors are particularly interesting, as they fit in the highway road type, and they constitute an essential backbone for road transport between countries. However, achieving seamless connectivity that satisfies the needs of connected and automated mobility (CAM) is very challenging in cross-border contexts. The authors highlight that the use of 5G NR leveraged the benefits of increased capacity, reduced latency and improved reliability enabling the environment for more advanced use cases in autonomous mobility that typically require timely and reliable transfers of vast amounts of data.
In this line, the article identifies relevant future 5G enhancements, and outlines how they will support the ambitions of highly automated driving in cross-border corridors. In order to conduct the study, a set of representative use cases and the related communication requirements were identified. Then, for each use case, the most relevant 5G features were proposed.
Identification of Use Cases
Vehicle platooning aims at green driving by grouping a set of vehicles to travel together one after the other. The vehicles that are part of the platoon exchange periodic data to move in a cooperative way. Here, autonomous vehicles can automatically join and leave platoons. Autonomous platooning is expected to be adopted first by trucks, which are some of the main users of cross-border corridors. Platooning optimises transport by using roads more effectively, reducing traffic jams and consequently delivering goods faster.
Extended sensors are focused on extending the perception obtained by the onboard sensors, with sensor data received from surrounding vehicles or road side units (RSUs). This way, vehicles generate an enhanced perception of the environment beyond what their own sensors can detect.
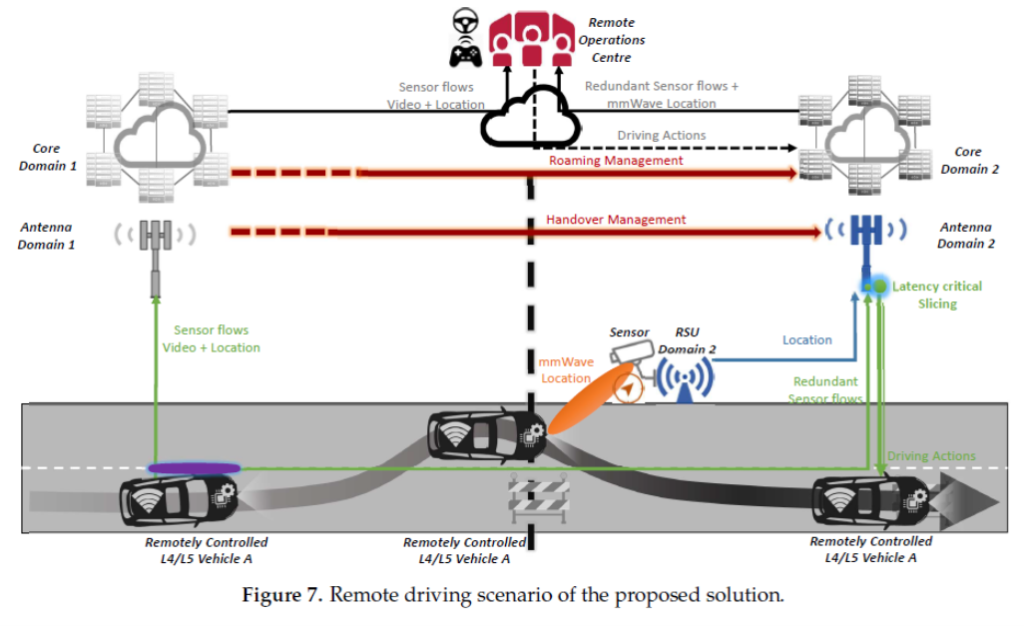
Remote driving enables a remote driver or a V2X application to operate a remote vehicle. In this CAM use case, a remote operator takes control of the vehicle when a breakdown or complex environment impedes the autonomous vehicle’s trajectory. The remote operator can be located in a different country from the vehicle position, so the constraints on a cross-border context may present operational limitations.
Advanced driving implies complex maneuvers such as overtaking or cooperative collision avoidance that require sharing the driving intentions with the vehicles in proximity. Poor performance of the communication pipeline in terms of latency or reliability may lead to a decrease in the level of automation and/or increase likelihood of accidents.
Use Cases’ Requirements
Each of the identified use cases can be implemented with different levels of automation while they all require high performance parameters in terms of connectivity. In this paper the researchers focus on highly automated driving, that is, SAE L4 and L5. Here, the requirements are even more demanding as there is no handover to manual driving.
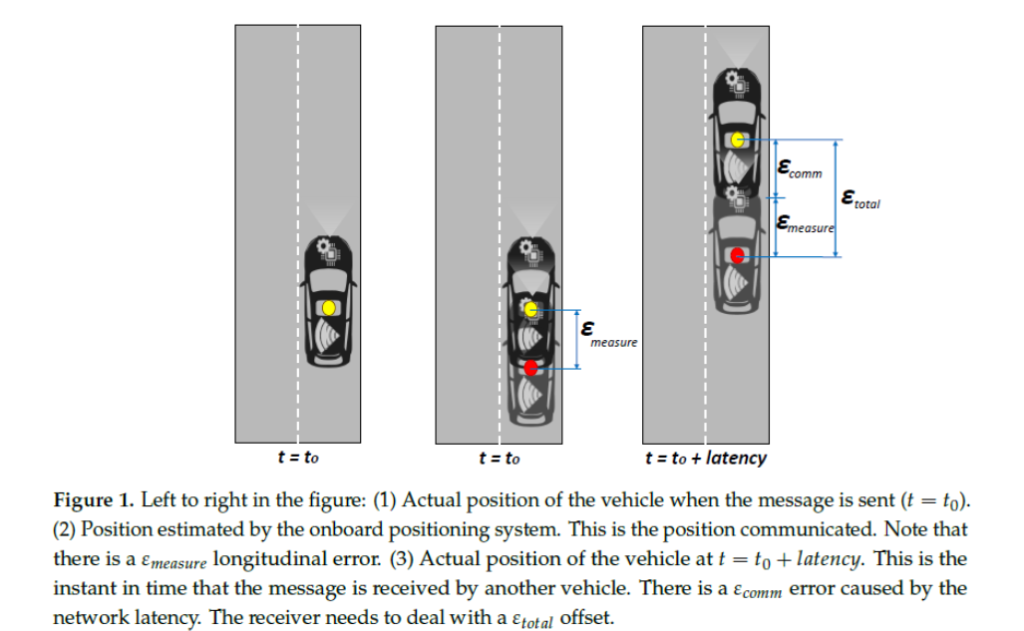
The spatial- and time-accuracy required by L4 and L5 autonomous vehicles with respect to object localization are key factors when translating the nominal performance of communication technologies to operational parameters of use cases. The latency in the positioning messages received from another vehicle or entity adds uncertainty to the transmitted localization value, with a higher impact on the longitudinal direction. This effect is depicted in the Figure 1 for the longitudinal error.
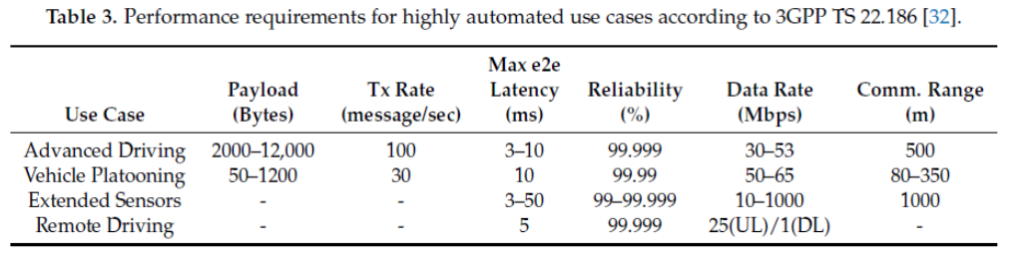
To sum up, researchers highlight that the identified CAM use cases have demanding performance requirements that cannot be met by LTE infrastructures. This is even more clear in a cross-border context that requires roaming, and they present some possible implementations.
Cross-Border Use Case Implementations
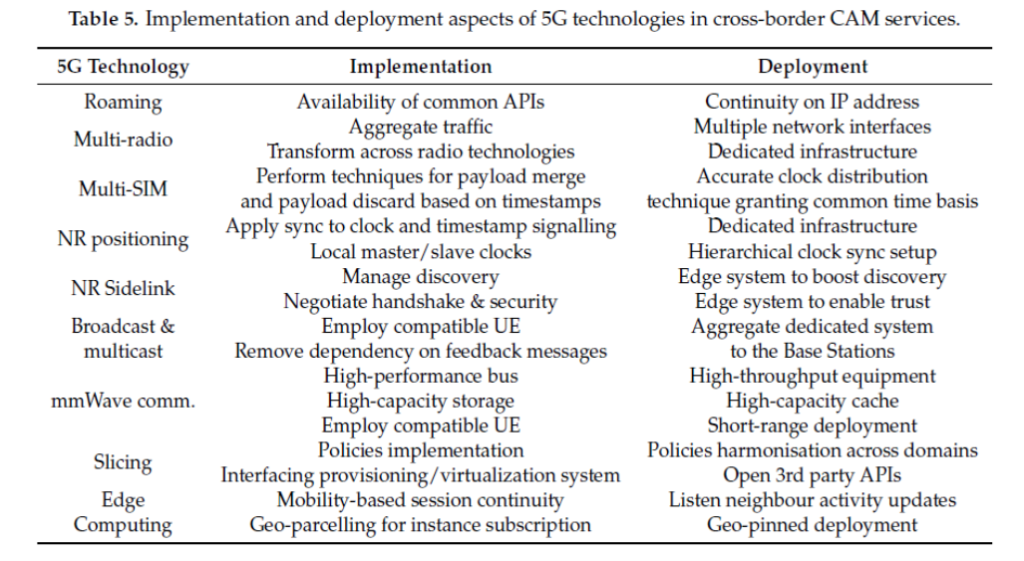
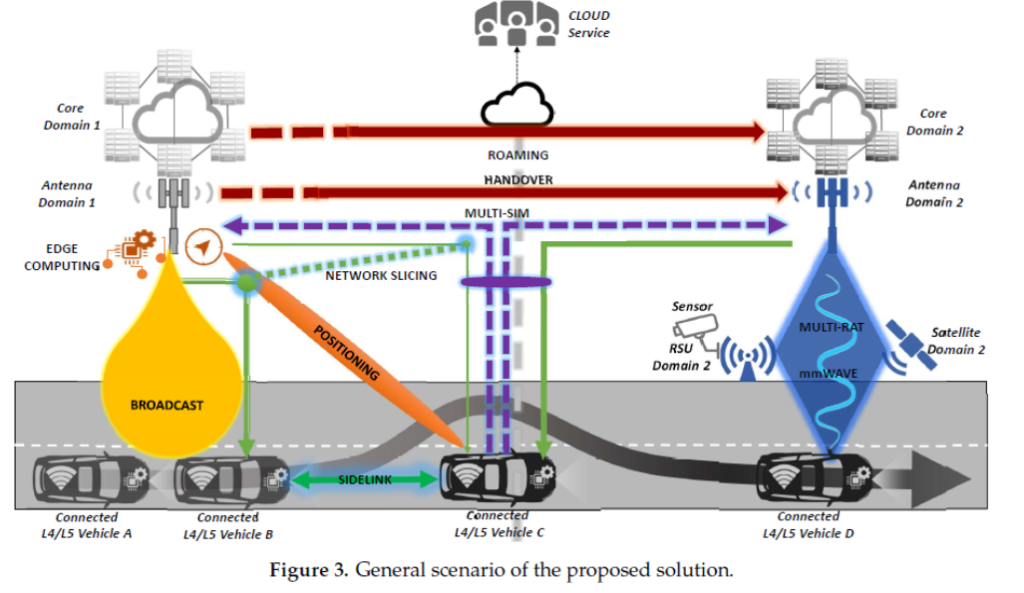
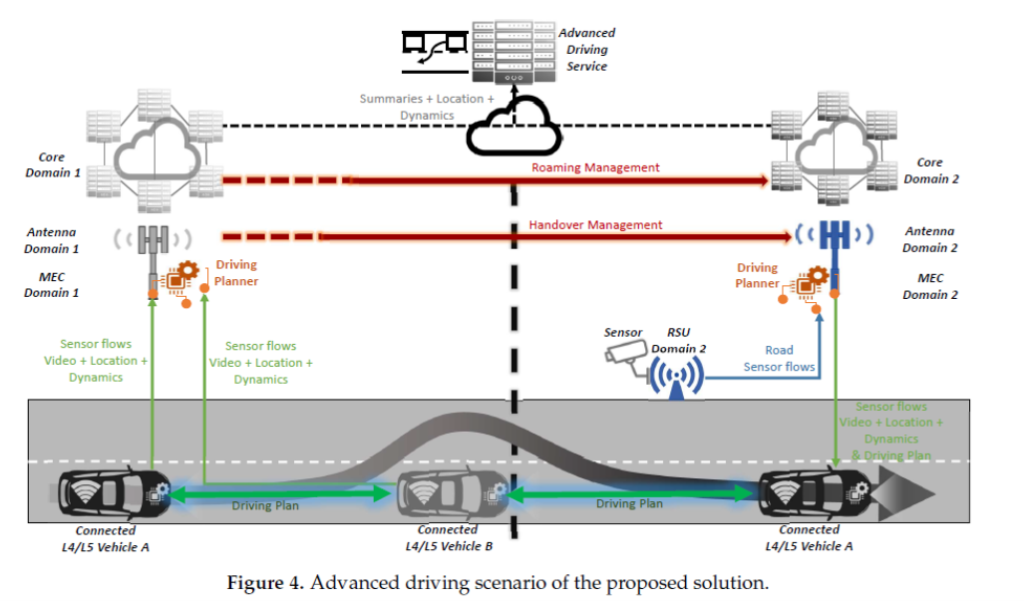
A) Advanced Driving: it involves the participation of different vehicles and infrastructures in order to cooperate and provide information for planning and operating a complex manoeuvre. Here, each participant may use a different communication technology. Thus, the interoperability provided by multi-modal/multi-radio technologies of 5G is critical to allow the information exchange from all the surrounding actors. As the manoeuvre required a synchronized response and coordination from vehicles, the network need to deal with the timely delivery of messages to foster a solid and consistent knowledge at one. Here, the generalized Precision Time Protocol (gPTP) provides reliable time synchronization. Furthermore, as the scenario timeframe for such advanced driving use cases is usually small, it is important to minimize communications interruptions and outages while some participants are migrating towards other cells (handover) or other networks (roaming) with low-latency migrations between the network infrastructures. Accurate positioning from 5G NR with meter accuracy further enhanced with the next 3GPP releases will bring sub-meter accuracy and will complement onboard sensor-based measures.
B) The vehicle platooning use case has some similarities with advanced driving, but here participants are not just exchanging information to facilitate a safe maneuvering. Instead, some participants with a common path enroll in a platoon and receive instructions from the leading vehicle. This use case brings a big challenge in the cross-border domain, as it involves a higher number of actors which will move across different borders and networks. Here, the synchronized acknowledgement among the platoon vehicles and the leader is mandatory, where the gPTP protocol is key to providing reliable time synchronization.
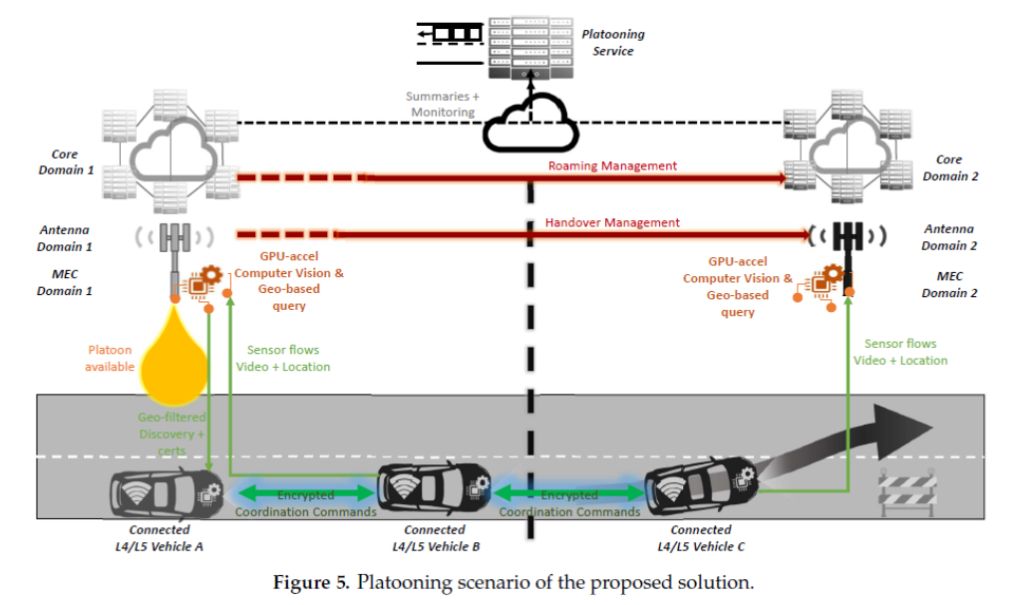
Accurate positioning of 5G NR complements onboard sensor-based measures; edge computing provides a higher level vision of the driving situation, gathering data from all the members in place and the QoS management of the traffic from a platoon when managing co-located services.
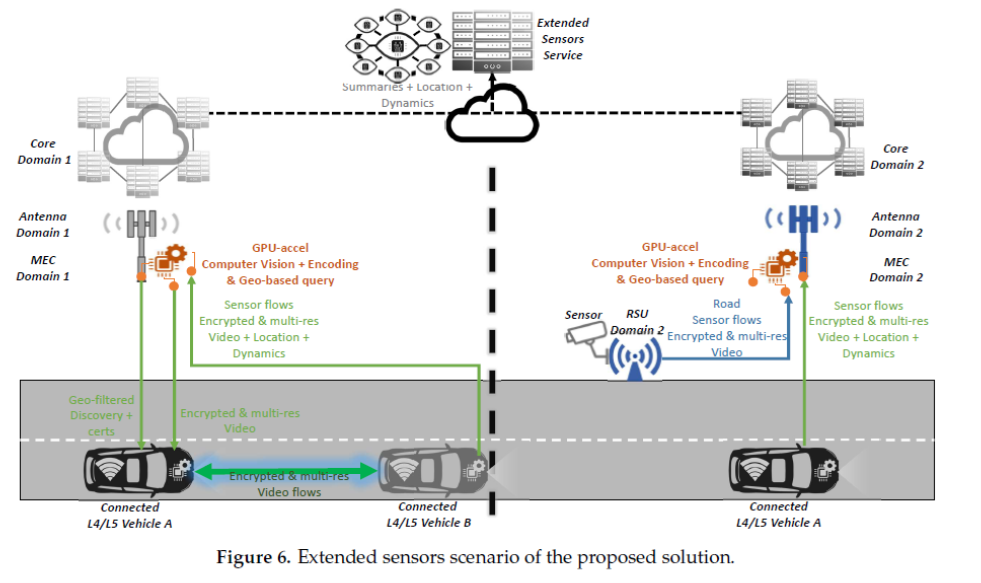
C) Extended sensors aim to expand data and environmental knowledge with information coming from sensors from surrounding systems such as RSUs or vehicles. The heterogeneity on the network interfaces of different systems makes multi-radio support necessary. Once the discovery protocol has been performed and the handshake between the data source and consumer is done, the sidelink communications, such as PC5 C-V2X and 5G NR sidelink, allow peers to communicate without management overheads from the network infrastructure. Here, specifically the edge computing architecture makes the difference, as the overheads for onboard computing resources can be offloaded to edge processing resources compiling, filtering and processing the raw data from vehicles to provide onboard systems with trusted and relevant metadata to be used by the onboard driving systems. From the latency perspective, sidelink communications make participant communications more direct and quicker. Furthermore, zero latency of edge computing enabled services will bring environmental understanding closer to the users empowering systems shipped at the vehicles with more additional sensor sources. Again, features such as positioning of 5G NR based on the use of a location server similar to LTE, may help to improve accuracy from sensors.
D) Remote Driving: In this use case the volume of information sent to the operator is big; the latency of remote actions must be low; the accuracy of positioning is helpful, especially for high speeds; and the reliability and stability of communications are essential to ensure continuous control. To this end, the multi-modal/multi-radio communications are key to operate through an appropriate radio access when the coverage of some of them falls. From the latency perspective, the utilization of multiple radio technologies is crucial to providing substitute connectivity when cellular radio technology violates the latency threshold. This manner, cellular coverage is augmented through alternatives and 5G vision aims to embrace heterogeneous technologies and contexts with a roadmap to merge technologies in public and private networks and bands. In this regard, network management tools to operate network slicing are also essential to ensure that critical operations are prioritized to other traffic. The harmonization of the provided slice in a multi-domain infrastructure is especially complicated in cross-border contexts, where each operator deploys its own policies and technology stack to monitor and control the network setup. In this case, sidelink communications are not required as the communication is between the cloud service and the controlled vehicle.
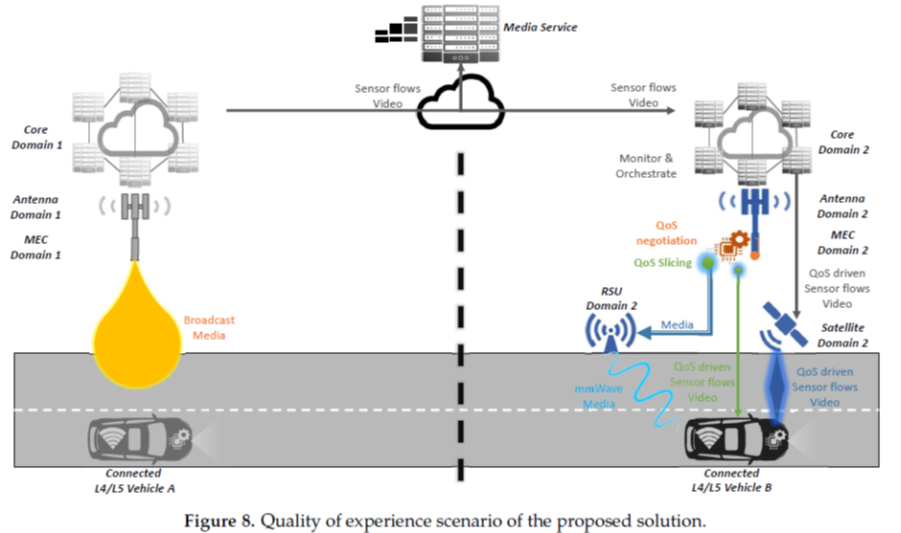
E) Vehicle Qos Support: this use case is transverse and intrinsically related to compensate network issues by finding ways to complement or substitute the under-performing radio link. From the latency perspective, as this use case in transverse, the manner that multi-radio, broadcast and network slicing technologies may help to reduce the use case latency.
Conclusions and Open Issues
In this paper the investigators took advanced CAM use cases targeted in 3GPP documents and put them into the cross-border context to identify further communication requirements. Then, they analyzed the roles and relevance of identified 5G features to meet CAM requirements.
The researchers stress that from the business feasibility perspective, the deployment and exploitation options of 5G in cross-border corridors should be studied further. Several aspects need to be considered for a successful deployment of 5G for CAM, such as the base station and MEC density or the backhaul provision. The authors point out that cost reduction solutions are also necessary that promote infrastructure sharing, and exploit cooperative models between the automotive industry, mobile network operators, road operators and new players such as cloud or edge service providers.