
The Robert S. Engelmore Award is sponsored by AAAI’s Innovative Applications of Artificial Intelligence conference and AI Magazine. The 2018 award was presented to Stephen F. Smith (Carnegie Mellon University) for sustained research excellence in constraint-based planning and scheduling technologies, deployment of those technologies to a range of significant real-world problems, and extensive service to the AI community that includes significant outreach to related technical fields. Smith’s lecture, which provided the basis for this article in AI Magazine, was first presented on Sunday afternoon, February 4 in the Grand Ballroom of the New Orleans Hilton in New Orleans, Louisiana USA. The article provides an a-up to-date review on Smart Infrastructure for Future Urban Mobility. Here are some of the key issues.
The major deterrent to urban mobility is traffic congestion. It is estimated that congestion costs residents of U.S. cities $160,000,000,000 in lost time and fuel costs, while pumping an additional 50,000,000,000 tons of CO. To make matters worse, people are increasingly moving to cities. The number of people living in urban areas is expected to grow from fifty percent of the world’s population currently to sixty-eight percent by 2050 (United Nations, Department of Economic and Social Affairs 2019). Unfortunately, the traditional traffic engineering approach to mitigating congestion, that of building more road capacity, is not typically possible in urban environments due to land-use issues, geographical constraints, and so forth that limit space for expansion. Instead, policies for reducing the number of vehicles on the road and increasing reliance on mass transit systems must be combined with mechanisms and technologies for increasing the efficiency of surface street traffic flows. In this article, we focus on this latter issue.
One key reason for poor traffic flows on urban surface streets, and hence one major cause of congestion today, is poorly timed traffic signals. The study point out that by and large, traffic signal control in urban road networks has changed surprisingly little over the past fifty years. Traffic signal timing plans are generally preprogrammed in advance, based on snapshot assessments of average traffic conditions by traffic engineers.
Actual traffic conditions can vary significantly from such average assessments, and, in any event, traffic patterns change over time as neighborhoods evolve. Despite the advances in intelligent systems and machine learning technologies in recent years, the traffic signal at the typical urban intersection remains an extremely unintelligent decision-making system.
For the past several years, the author´s research group has been developing and refining an approach to real time, adaptive traffic signal control aimed specifically at urban road networks. Real-time traffic signal control presents a challenging multiagent planning problem in this setting, where, unlike simpler suburban corridors, there are competing dominant traffic flows that shift through the day. Further complicating matters, urban environments require attention to multimodal traffic flows (vehicles, pedestrians, bicyclists, buses) that move at different speeds and may be given different priorities.
The author´s approach to this problem is embodied in a real-time, adaptive traffic signal system called scalable urban traffic control (Surtrac). Combining principles from automated planning and scheduling, multiagent systems, and traffic theory, Surtrac treats traffic signal control as a decentralized online planning process. In operation, each intersection repeatedly generates and executes (in a rolling horizon fashion) signal-timing plans that optimize the movement of currently sensed approaching traffic through the intersection.
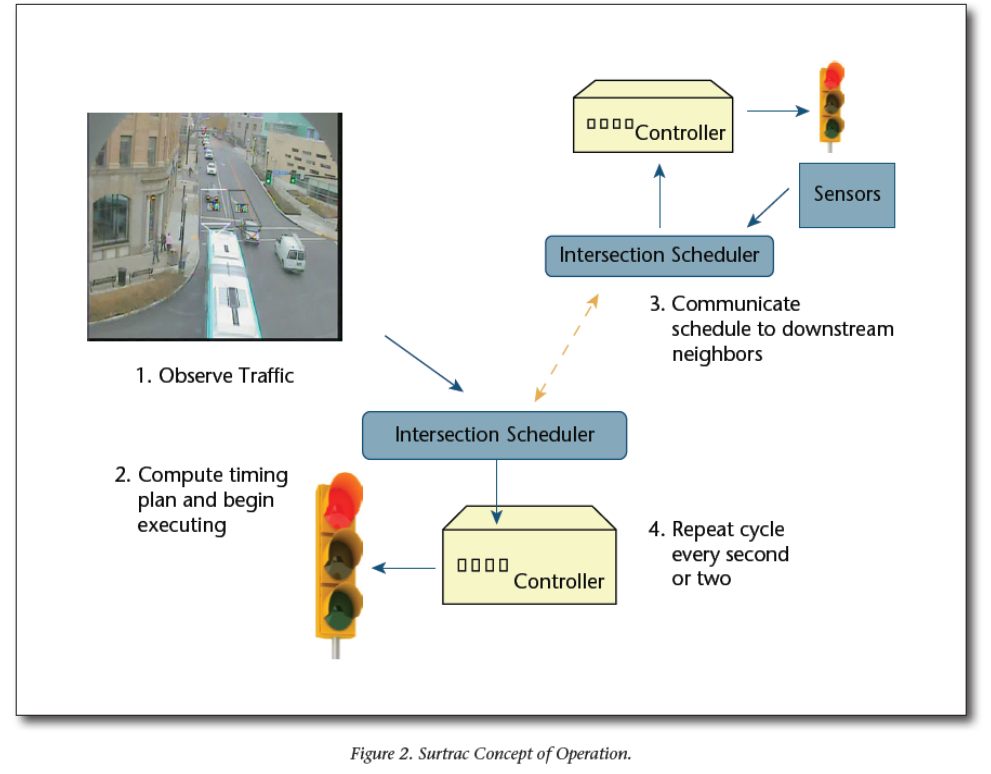
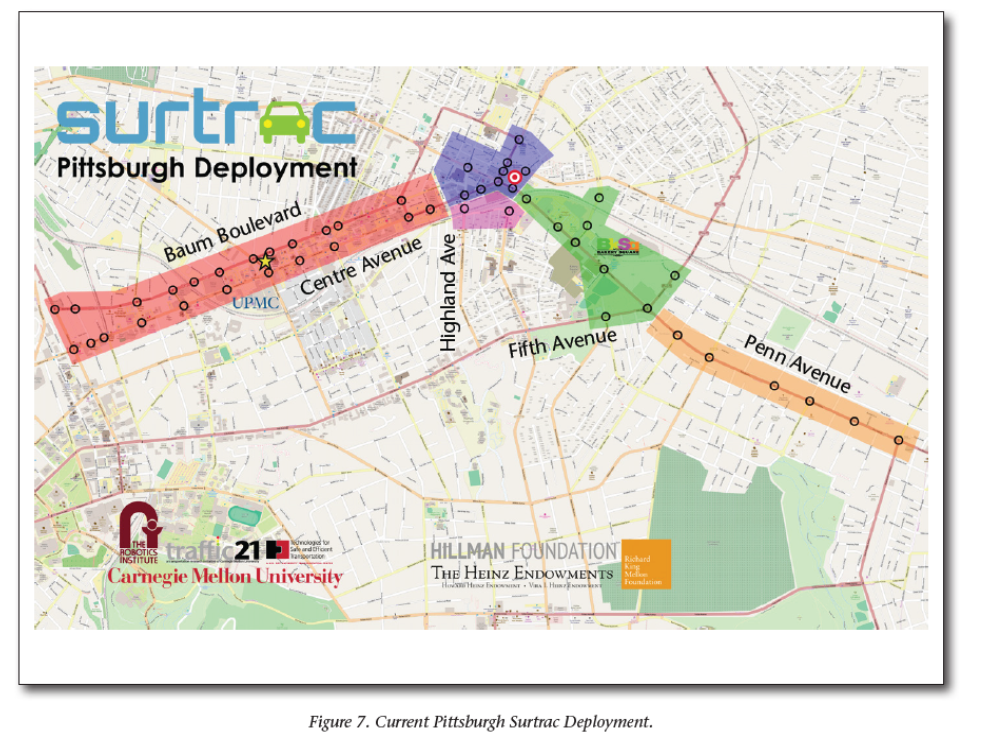
Each time a new plan is produced (nominally every couple of seconds), the intersection communicates to its downstream neighbors what traffic it expects to send their way, allowing intersections to construct longer horizon plans and achieve coordinated behavior. The system is now deployed and operating in several U.S. cities, including Pittsburgh, Pennsylvania; Atlanta, Georgia; More recent work has focused on integrating real-time adaptive signal control with emerging connected vehicle technology, and exploration of the opportunities for enhanced mobility that direct vehicle to-infrastructure (V2I) and pedestrian-to-infrastructure (P2I) communication can provide.
How it works
The research group put a computer running the Surtrac system at every intersection. At the beginning of each planning cycle, each intersection pulls a snapshot of its approaching traffic flows from its local sensors (video cameras, radar, etc.) and develops a predictive model of when traffic in various approaching directions is expected to arrive at the intersection. Based on this predictive model, the system generates, in real time, a signal timing plan that optimizes the movement of approaching traffic through the intersection. Once the timing plan is generated, the system begins to execute it, sending a command to the controller (the hardware device that controls the signals) to either extend the current phase or switch to the next phase.
The system also communicates the traffic it expects to be sending to its downstream neighbors. Downstream intersections are doing the same thing, generating their own local timing plan, but now, in addition to the approaching traffic that they can see through their local sensors, they have an expectation of what traffic is coming down the pike behind them, which allows them to generate a longer horizon plan. Each intersection asynchronously initiates a new planning cycle every second or two.
According to the study there are several basic advantages to this real-time approach to traffic signal control. First and foremost, traffic signals are optimized for the actual traffic on the road at any point in time. Second, the approach is designed for optimization of grids and other complex urban road networks, with suburban corridors being handled as a special case.
Third, the predictive model that is generated can be weighted according to traffic mode (for example, passenger vehicle, bus, pedestrian, bicyclist), and, therefore, Surtrac-generated timing plans can reflect multimodal optimization criteria. Finally, because the system is decentralized, there is no centralized planning bottleneck, and the system is inherently extensible to city scale. Moreover, the system’s decentralized framework also promotes incremental deployment, which allows cities to spread their infrastructure investments over time.
Results: travel times were reduced by over twenty-five percent, number of stops were reduced by over thirty percent, and amount of wait time was reduced by forty percent. Although emissions data were not collected, a standard fuel consumption model was applied and showed an estimated reduction of emissions of about twenty percent. Further details of the pilot test can be found in Smith et al. (2012, 2013).
Finally, the research stress that the current technology development efforts center on vehicle route sharing (an equipped vehicle’s willingness to share its route with the infrastructure in order to reduce uncertainty in the signal system’s predictive model), smart transit priority, safe intersection crossing for pedestrians with disabilities (an app that allows pedestrians with disabilities to directly communicate with signalized intersections and actively influence traffic control decisions), real-time incident detection, and integrated optimization of signal control and route-choice decisions.