Researchers Suchithra Rajendran and Sharan Srinivas, from the Department of Industrial and Manufacturing Systems Engineering, College of Engineering, Department of Marketing, University of Missouri, Columbia, USA, published an article creativecommons.org in 2020 regarding the air taxi service for urban mobility. The article provides an up-to-date review on this issue. Here are some of the key issues.
Traffic congestion has become a ubiquitous problem in urban areas due to various reasons, such as high population density, increase in privately-owned vehicles, rise in the number of commuters traveling from low-density areas where public transits do not serve passengers effectively, and average household income inflation In metropolitan cities, such as Los Angeles and New York, an average commuter spends over 90 minutes in traffic resulting in an increase in stress and anxiety. Such congestions also lead to 330 grams per mile of CO2 emissions into the atmosphere. Besides having a detrimental impact on the health of the commuters and the environment, it also contributes to economic loss. For instance, Manhattan experiences an annual loss of $20 billion due to traffic congestion, with the excess fuel and ve hicle operating cost accounting for nearly 13% of the total loss.
Several logistics companies and aviation agencies are striving to leverage urban air mobility (UAM) using flying taxi services, an aviation ride-hailing concept, that is expected to launch in the forthcoming years.
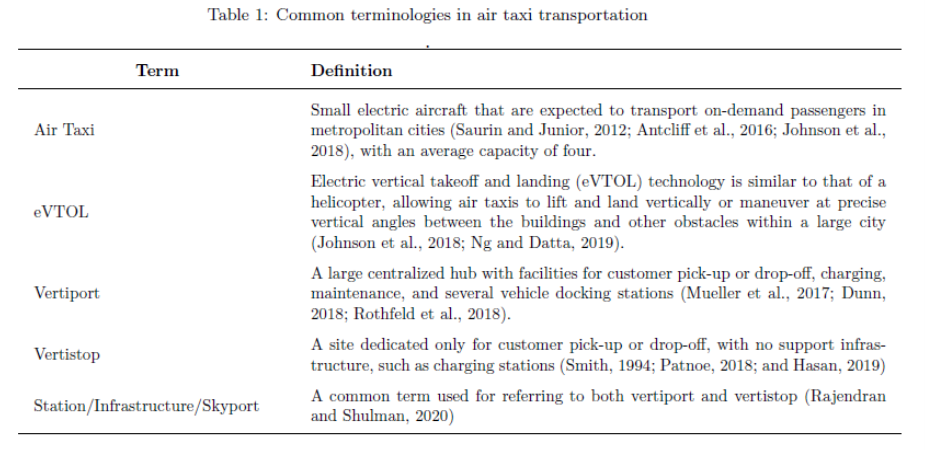
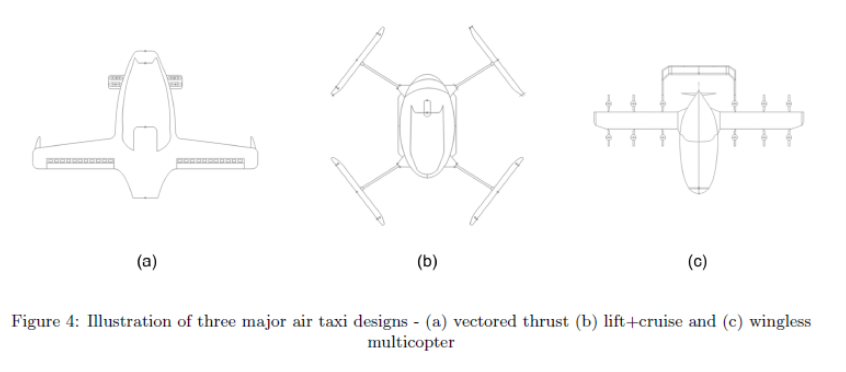
Through the use of proposed fully electric vertical takeoff and landing (eVTOL) vehicles, air taxi service (ATS) could offer a faster and reliable mode of transportation.
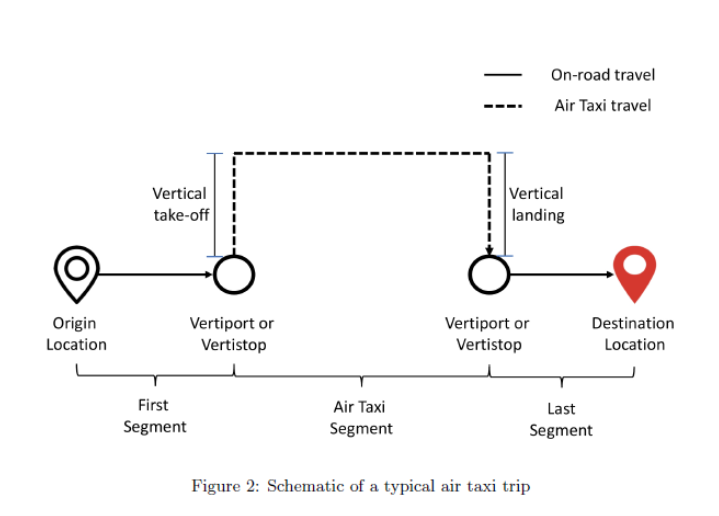
An ATS shares the characteristics of common transportation modes, such as regular taxis and subways. The experience of requesting an ATS would be similar to the process of booking a standard on-demand mobility (ODM) service. Typically, a registered customer will enter the pickup and drop-off locations using a ridesharing application. Depending on the trip information, the platform will estimate the fare amount and travel time for all applicable transportation modes, such as air and regular taxis.
An ATS is anticipated to have multiple segments. The first segment of the trip (commute from the pickup location to a vertiport/vertistop) is facilitated by the ridesharing platform via on-road car trips. Subsequently, the longest segment of the trip is covered by an air taxi, where the passenger is transported from the origin skyport to the destination station. Finally, the last mile of the trip (i.e., travel from the destination skyport to the drop-off location) is again complemented by regular taxis.
Air Taxi Network Design
The study highlights that many factors contribute to a location being chosen as a strategic operating station, such as the demand density, existence of adequate area for safe departure/landing, availability of space for charging stations, and easy accessibility.
Several studies propose to repurpose existing rooftop helipads, floating barges, the centers of interstate turnabouts, and top levels of parking garages, as they offer compelling space and locational advantages for urban operations. Using such existing structures or facilities would allow faster implementation and lower overhead costs over the short-term.
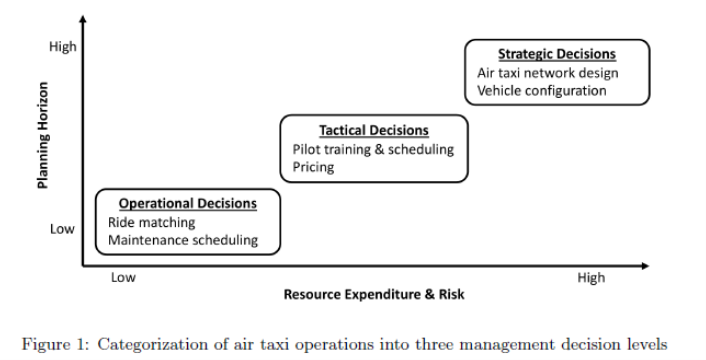
Ride-Matching
Ride-matching is the process of assigning one of the available vehicles to a customer request.
For any on-demand, ride-hailing service (on-road or air taxi), efficient matching of commuters (demand) with vehicle (supply) is crucial for minimizing customer wait time and vacant/empty trips. The flexibility in matching a request to a vehicle depends on the market type. In a one-sided market (OSM), the platform has only one group of customers (demand-side/commuters) as it controls the entire supply of vehicles (and drivers). On the other hand, the platform acts as an intermediary between the two groups of customers (independent drivers who own the vehicle, as well as riders) for a commission in a two-sided market (TSM).
As the supply and demand are expected to vary over time and location, these matching systems should be automatic and dynamic to facilitate swift on-demand coordination. The complexity of trip matching depends on the type of ride-hailing request, which can be broadly classified into two categories:
• Single Customer Service per Trip: The vehicle transports an individual customer from a pickup point to a destination location.
• Multiple Customer Service per Trip (Ridesharing): The vehicle accommodates numerous customer requests, which occur around the same time and have a different, but nearby, origin as well as destination locations on a trip.
The on-road segment of ATS is equivalent to the operations of existing on-demand ride services, such as Uber and Lyft. Therefore, matching algorithms of these ODM services can be adapted for transporting the rider from the pickup location to a skyport or from a station to the drop-off location.
The authors stress that the efficiency of the on-road segment can be improved by involving shared rides. The inherent advantages of ridesharing are lower trip cost, conservation of fuel, reduced traffic congestion, lessened travel time, and reduced air pollution. Nevertheless, the matching process becomes even more complicated when incorporating shared rides. Specifically, sequencing the pickup and drop-off of multiple passengers in ridesharing complicates the decision process and makes the optimal pooling problem hard to solve.
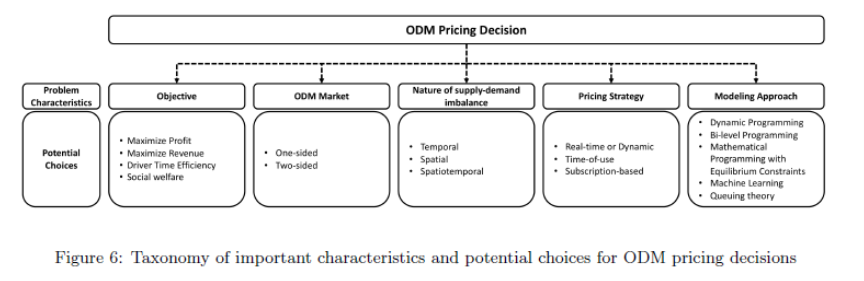
Pricing Strategies for On-Demand Mobility
Pricing refers to the method of establishing the passenger fare for an ATS. Besides base fare (a flat fee per ride), the trip cost would also be impacted by ride distance, duration, booking fees, price multiplier, promotions, and ridesharing discounts Determining the pricing scheme for an ODM service is a crucial problem as it has a direct impact on supply-demand equilibrium and revenue. Typically, a customer pays more than the regular price in the case of high demand and low supply.
A subscription-based pricing strategy can be adopted as it protects customers from high price fluctuations by charging a fixed fee per time period in advance.
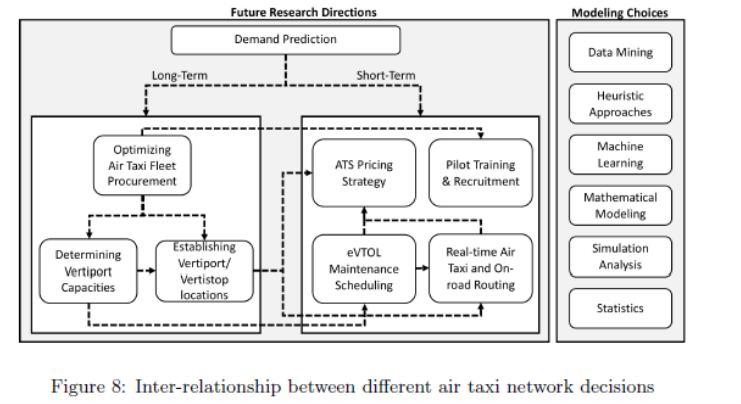
Opportunities for Future Research Directions
Based on the review of the current developments and challenges in the literature pertaining to air taxi systems, the researchers observe the following research areas to be under-explored:
–Optimizing Fleet Procurement: the availability of air taxis at the right time at the right place is essential to maintain a specified customer service level, while minimizing cost.
-Pricing Strategy for Air Taxi Operations: determining the optimal pricing strategy for regular taxis is extensively discussed in the literature.
-Integration of Ground and Air Transportation Scheduling: to ensure door-to door services for customers, ATS is complemented by ground transportation for the first and last-mile delivery.
-Leveraging Mobility as a Service (MaaS) Facility for ATS: the incorporation of other intermodal transportation with ATS could also be examined in the future. For instance, research related to Mobility as a Service (MaaS) attempts to deliver affordable ODM commutes leveraging existing public transportation infrastructure.
-Pilotless Air Taxi Systems: pilotless VTOL flights, which are operated using an onboard computer interfacing with a ground control center, are being proposed in recent studies (Ma, 2017). Therefore, research on integrating the aforementioned future directions for pilotless VTOL designs could also be explored by taking into account factors, such as customer’s willingness-to-fly in an unmanned system.