
Transportation Systems (ITS) aim to improve safety, mobility and environmental performance of road transport. The INSIGMA project provides a fresh look at the possible innovations in this field, by enhancing the functionality and accuracy of ITS in urban environments.
Researchers Wojciech Chmiel, Jacek Danda, Andrzej Dziech, Sebastian Ernst, Piotr Kadluczka, Zbigniew Mikrut, Piotr Pavlik, Piotr Szved and Igor Wojnicki published an article online on 26th May 2016, named INSIGMA: an intelligent transportation system for urban mobility enhancement regarding an intelligent transportation system. The article provides an a-up -to date review on this issue. Here there are some of the key issues.
Modern Intelligent Transportation Systems (ITS) are a useful and necessary tool made to help battle traffic congestion. Among other advantages, it is expected that dynamic traffic control and vehicle navigation will largely raise the constraints of road infrastructure development.
Currently, such systems are mainly based on statistical data acquired from historical traffic statistics, which are insufficient, especially in case of a sudden increase in traffic related to accidents and road collisions. A similar situation occurs in car navigation systems. Statistical traffic data no longer allow avoiding traffic jams and for this reason optimal solutions based on real-time data are, therefore, necessary.
The researchers highlight that the INSIGMA project is focused on providing advanced tools for traffic monitoring and for detection of dangerous events. The main objective is to analyze traffic parameters using dynamic data, obtained from existing and custom-developed sensors.
One of the core concepts of INSIGMA is the dynamic map: a representation of the road transport infrastructure, combined with information about current traffic intensity as well as historical traffic data. Such a set of data includes map-related parameters stored in a database, which can be visualized and delivered to the end user via a dedicated mobile or web interface. The system includes algorithms for dynamic route optimization, which operate on real-time dynamic data, as opposed to statistical data used by many existing road navigation applications.
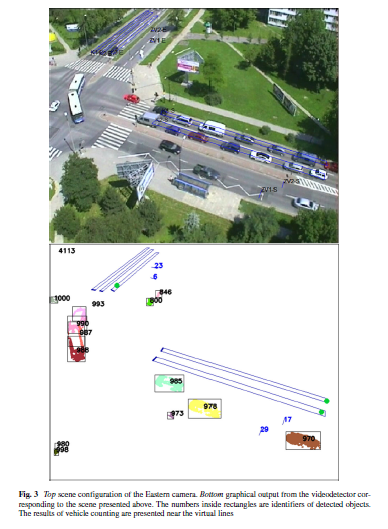
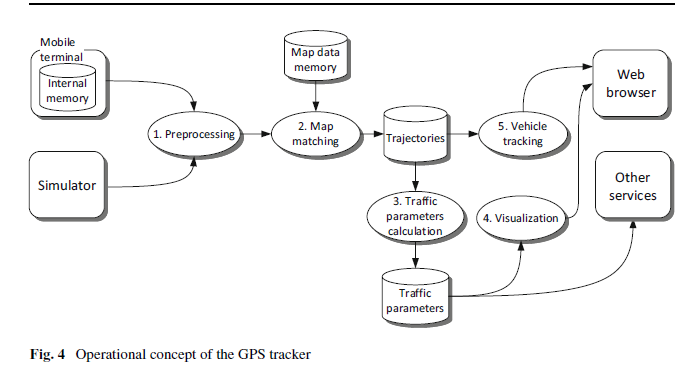
What differentiates INSIGMA from other systems is the use of video detection and GPS positioning to gather information about the current traffic.
The INSIGMA system is based on three main data-oriented: the Static Map, the Dynamic Map and the Dynamic Map Warehouse They handle slow-changing, fast-changing and historical data related respectively to the transport infrastructure. The slow-changing data regards road infrastructure, including details like roads, junctions, lanes, traffic signs, and road accessibility. The accessibility parameter indicates whether particular roads are available for specific users, such as regular or emergency vehicles. An emergency vehicle, for instance, is allowed to use a sidewalk, while a regular vehicle is not.
The fast-changing data regard dynamic parameters, so-called monitoring parameters, which represent the current or recent traffic conditions and events, including threat reporting or detection. The historical data regard aggregated fast-changing data with relationships to the slow-changing data objects. Separating it from the dynamic parameters provides means to conduct time-based analysis offloading the Dynamic Map.
Data gathered by these three data storesare accessible through web service-based interfaces: IMS (INSIGMA-Map-Static) Interface, IMD (INSIGMA-Map-Dynamic) Interface, and IHD (INSIGMA-wareHouse-Dynamic) Interface.
A Dynamic Map system running at full throughput, handling 5 metropolitan areas and acquiring data from 11,250 sensors, generates a data growth rate of 500 facts per second. Assuming approximately 100 bytes per fact, the data volume is 28GB per week. Such a growth rate would overload the Dynamic Map by slowing down or crippling its processing capabilities. To prevent that, historical facts are transferred into the Dynamic Map Ware- house.
In the INSIGMA system, privacy is related to both video and GPS/GLONASS tracking. Each digital image from the camera can contain sensitive data, taking into account the privacy of registered persons or vehicles. Special attention is paid to the protection of images of faces, license plates and other information that can be used to identify identities.
4 Conclusions
The paper presents the contribution of the INSIGMA project to the Intelligent Transportation System (ITS) domain. The proposed tools and components provide functions and services related to traveler information, traffic management and emergency transportation operations. They are built around the Dynamic Map concept, a repository which gathers dynamically changing and constantly updating traffic and event-oriented information.
The information gathered by the Dynamic Map comes from several sensors deployed in an urban area including but not limited to: video detectors and GPS trackers. Several services are also provided. These include route planning and traffic lights opti- misation as well as traffic management.
The researchers conclude that, compared with other ITS, the proposed system provides a comprehensive, integrated source of traffic related information. It is capable of being easily extended with a range of diverse sensors. Furthermore, it is applicable to urban areas where centralized and global route planning services tailored for specific users provide the greatest impact.
From a variety of functions which can be provided by an ITS, the system developed within the INSIGMA project supports: traveler information, including route planning, on-trip traffic information and route guidance, as well as traffic management (transportation planning and traffic control).
The paper stresses that the key concept within the system is the Dynamic Map, which integrates the description of a road network with dynamically- changing traffic information.
Within the project, advanced algorithms for dynamic route planning and traffic control have been developed. It is expected that their application in real life will significantly improve mobility and environmental performance.
Source: https://link.springer.com/article/10.1007/s11042-016-3367-5